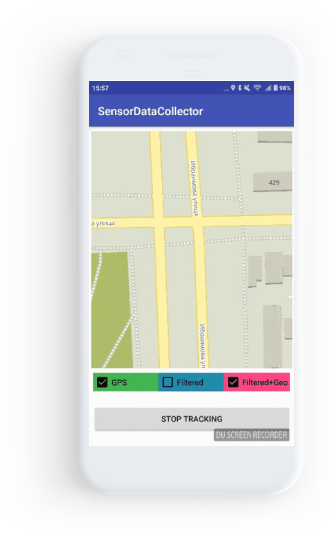
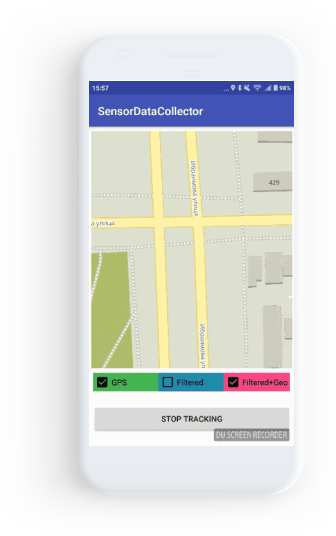
Точные и «чистые» данные с датчиков GPS
Фильтр ошибок GPS датчиков

без фильтра
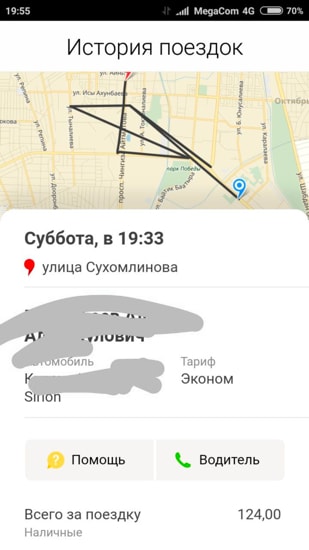
с фильтром

Зачем нужен фильтр?

Устали от «лишних» километров из за GPS в приложении такси?

Постоянные «скачки» GPS в приложении для учета передвижения курьеров?

Есть потребность в точном трекинге в любом on-demand сервисе?
Решение - Mad Location Manager
Что умеет Mad Location Manager?

Уменьшает ошибки трекинга маршрута

Исключает резкие «скачки» координат в точки, удаленные от реального маршрута

Позволяет сделать плавным движение объектов на карте

Уменьшает шумы с датчиков телефонов низкого класса

Фильтрует ошибки при кратковременной потере GPS сигнала
И другие задачи, связанные с доставкой и трекингом движущихся объектов на карте

Как работает?
Для реализации задачи нам необходимы данные с трех датчиков:

Магнитометр
Этот датчик помогает определить, где север

Акселерометр
Используется для определения ускорения тела и угла наклона


Гироскоп
Позволяет найти текущее положение объекта, зная начальное положение устройства и проинтегрировав показания гироскопа

Самым простым и удобным оказались виртуальные датчики Android
У нас есть вектор ускорения в «абсолютной» системе координат поэтому можно приступать к реализации фильтра Калмана

Виртуальные датчики Android
Чтобы определить ускорение, можно воспользоваться датчиком LINEAR_ACCELEROMETER, который выдает ускорения относительно осей телефона. Для определения ориентации в пространстве можно использовать ROTATION_VECTOR

Фильтр Калмана
Определяем вектор состояния системы, матрицу перехода, управляющий вектор и прочие компоненты фильтра Калмана. Определяем ковариационные матрицы шума процесса и шума измерений. В такой форме довольно легко расширить фильтр
А если коротко…




Параметры фильтра
Определяемся с типами матриц

Вектор состояния системы

Матрица эволюции системы

Матрица управления

Вектор управления

Матрица измерений равна единичной матрице
Реализовываем несколько операций с матрицами
Матрица измерений равна единичной матрице, если GPS -приемник предоставляет информацию о скорости. Если же GPS-приемник предоставляет только координаты, то матрица примет такой вид:
 рис. 1
рис. 1
Второй вариант показывает лучший результат при кратковременной потере GPS сигнала, потому что на вектор состояния не влияет последняя полученная от приёмника скорость.
 рис. 2 Ковариационная матрица шума измерений
рис. 2 Ковариационная матрица шума измерений
Если GPS приемник не предоставляет информацию о скорости объекта. В противном случае:
 рис. 3
рис. 3
Можно распарсить NMEA сообщение и использовать компонент HDOP, можно использовать класс Location и метод getAccuracy(). Чтобы получить скорость в нашей системе координат необходимо получить направление. Это либо компонент course в NMEA сообщении, либо bearing из объекта Location.

 Рис. 4 Ковариационная матрица шума процесса
Рис. 4 Ковариационная матрица шума процесса
Из-за интегрирования показаний акселерометра ошибка позиционирования, связанная с акселерометром, будет увеличиваться с течением времени. Соответственно, мы должны будем меньше полагаться на данные акселерометра и, в конечном итоге, должны будем принять координату от GPS приемника, а не от акселерометра. Dt — время между двумя шагами update (между получением GPS координат) фильтра Калмана.
Чтобы фильтр Калмана работал, нужно привести все данные к единой системе координат.
GeoHash
Алгоритм для преобразования двух координат вида 42.8795949 (долгота), 74.5998444 (широта) в одну строку
В данном проекте используется для решения двух проблем. Во-первых, необходимо как-то объединить находящиеся рядом точки, чтоб снизить поток избыточной информации. Для этого можно выбрать какой-нибудь радиус и объединять все точки, попадающие в окружность с этим радиусом. Но как выбрать радиус и центр этой окружности? Вычисление расстояния в сферических координатах — дорогостоящая операция, поэтому была использована geohash функция, которая позволяет очень быстро определить, относятся ли точки к одной области или нет. Эта функция выдает хэш в виде строки, длина которой определяется пользователем и влияет на точность кодирования. Чем больше длина хэша, тем меньше область и больше точность координат в одной области. Максимальная возможная длина геохэш-строки — 12 символов. Очень хороший результат показывает длина хэша 7 или 8 символов.
Ещё одно применение этой функции
Определение и фильтрация «скачков». Мы будем считать, что если GPS приемник выдал подряд больше трех (параметр задается пользователем) координат с одним хэшем, то эта точка правильная и её нужно учитывать. Если же меньше — то, вероятно, это какое-то случайное значение, которое не нужно учитывать.
Как видно из приведенных примеров, GeoHash фильтр позволяет значительно сократить количество обрабатываемых точек. Это может быть критичным, если координаты обрабатываются сервером или если планируется сохранять маршруты в базе данных.
Результат работы, вывод и дальнейшие улучшения
В результате был написан Android модуль и библиотека на C, реализующие все вышеперечисленный фильтры. Визуально тракетории стали более сглаженными и исчезло накручивание дистанции при отсутствии движения. Как следствие — улучшился подсчет пройденной дистанции.
Зелёная линия - сильно зашумленные данные GPS. Красный - результат фильтрации (сначала Калман, затем на основе GeoHash).
Для подсчета дистанции использовались два алгоритма. Один из них — алгоритм Винченти. Он используется внутри метода distanceBetween() класса Location. Второй метод: https://en.wikipedia.org/wiki/Great-circle_distance (раздел с haversine формулой). Тесты показывают, что результат почти не отличается. Притом, второй вариант затрачивает намного меньше ресурсов. Однако есть подозрение, что на больших дистанциях погрешность будет больше. Тем не менее, в пределах города второй алгоритм показывает такой же результат, как и первый.
Используй и развивай
Данное решение имеет лицензию MIT не забывай про копирайты и указания авторства
Вся магия случилась благодаря
Для консультации, благодарности или для получения услуг по внедрению библиотеки пишите нам team@maddevs.io 